Overview¶
There are several major advantages of using E-Series storage for Swift object storage nodes. These include:
- A dramatic reduction in the storage capacity and physical hardware required to facilitate data protection through Swift’s consistent hashing ring. The unique characteristics of E-series’ Dynamic Disk Pools (DDP) enable the use of a parity protection scheme for data protection as an alternative to the default approach involving creating 3 or more copies of data. Within a single site, the capacity required for object storage along with the parity overhead is an approximate 1.3 multiple of the object(s) stored. The default Swift behavior involves storing a multiple of 3.
- The reduction of replicas made possible by the use of DDP has the effect of significantly reducing a typically major inhibitor to the scale a given Swift cluster can achieve. It has been observed that the weight of replication traffic can become a limitation to scale in certain use cases.
- The associated storage capacity efficiency associated with employing DDP
- Reduced Swift node hardware requirements: Internal drive requirements for storage nodes are reduced, only operating system storage is required. Disk space for Swift object data, and optionally the operating system itself, is supplied by the E-Series storage array.
- Reduced rack space, power, cooling and footprint requirements: Since a single storage subsystem provides storage space for multiple Swift nodes, smaller and possibly lower power 1U nodes can be used in the cluster.
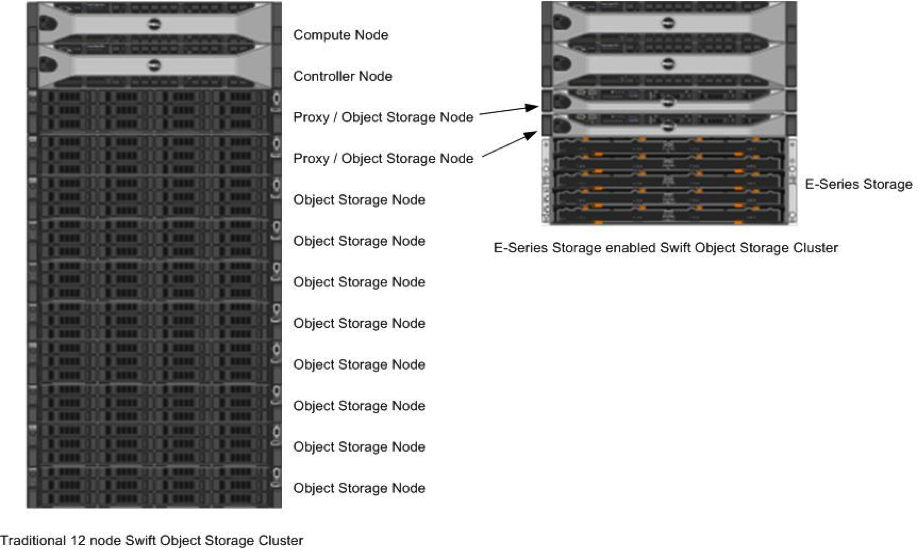
Traditional and E-Series Swift Stack Comparison
On the left of Traditional and E-Series Swift Stack Comparison is a traditional Swift cluster, which has a total storage capacity of 240TB. This requires 10 Swift object storage nodes with 12 2TB drives per system, which results in approximately 80 TB of effective storage capacity assuming that Swift uses the default replica count of 3.
Compare this traditional system to the E-Series based cluster, shown on the right in Traditional and E-Series Swift Stack Comparison. The E-Series cluster has identical controller and compute nodes as the traditional system. In the E-Series cluster the effective 80TB storage capacity of the traditional system can be obtained by using a single 4U storage subsystem. The dynamic disk pools (DDP) data reconstruction feature on E-Series replaces the data replication implementation of Swift. As mentioned above, this enables a 1U server (with similar memory and CPU resources as the traditional cluster object nodes) to be used in the E-Series stack. This results in 42% less rack footprint and approximately 55% in drive savings (120 drives vs. ~54 drives for an E-Series based cluster). Additionally the number of attached Swift object storage nodes attached to the E-Series can be increased if additional object storage processing capacity is required.
Tip
Swift may also be deployed in conjunction with the NetApp FAS product line, as an iSCSI LUN could be used as a block device to provide storage for object, container, or account data. This deployment may be used in situations where the scale of an object storage deployment is small, or if it is desirable to reuse existing FAS systems.
E-Series storage can effectively serve as the storage medium for OpenStack Object Storage. The data reconstruction capabilities associated with DDP eliminate the need for data replication within zones. DDP reconstruction provides RAID-6 data protection against multiple simultaneous drive failures within the storage subsystem. Data that resides on multiple failed drives is given top priority during reconstruction. This data has the highest potential for being lost if a 3rd drive failure occurs is reconstructed first on the remaining optimal drives in the storage subsystem. After this critical data is reconstructed all other data on the failed drives is reconstructed. This prioritized data reconstruction dramatically reduces the possibility of data loss due to drive failure.
This document is licensed under Apache 2.0 license.